Via Automation – eine kleine Tour durch die automatische Steuerung: Feedback


Auf den ersten Blick mag es seltsam erscheinen, während einer Wanderung über automatische Steuerung zu sprechen. Genießen die meisten von uns Wanderungen nicht gerade deshalb, um in die Natur zu kommen und der Industrialisierung zu entfliehen? Wie wir bereits im vorherigen Beitrag gesehen haben, sind unsere Werkzeuge eng mit wirksamen Strategien zum Schutz unserer Umwelt verflochten, aber vielleicht noch wichtiger und direkter ist, dass die Betrachtung von Steuerung und Optimierung als ausschliesslich für die Industrie relevant viele der schönen und nützlichen Dinge, die wir tun, zunichte macht.
Letztendlich geht es jemandem, der sich mit automatischer Steuerung beschäftigt, darum, dynamische Systeme und ihre grundlegende Funktionsweise zu verstehen. Diese Systeme können industrieller Natur sein, müssen es aber nicht. Wir wollen insbesondere verstehen, wie sich dynamisches Verhalten (d. h. die Verhaltensmuster, die innerhalb eines Systems im Laufe der Zeit auftreten) verändern lässt, um beispielsweise die Genauigkeit eines 3D-Druckers zu verbessern, Flugzeuge beim Wenden sanft zu stabilisieren, Kaffeemaschinen effizient zu beheizen und sogar die Kalziumregulation bei Kühen zu verstehen. Ob Sie es glauben oder nicht, alle oben genannten Beispiele (sogar die Kühe) können mit mehr oder weniger denselben Werkzeugen untersucht werden, und das übergeordnete Thema hierbei ist Feedback.
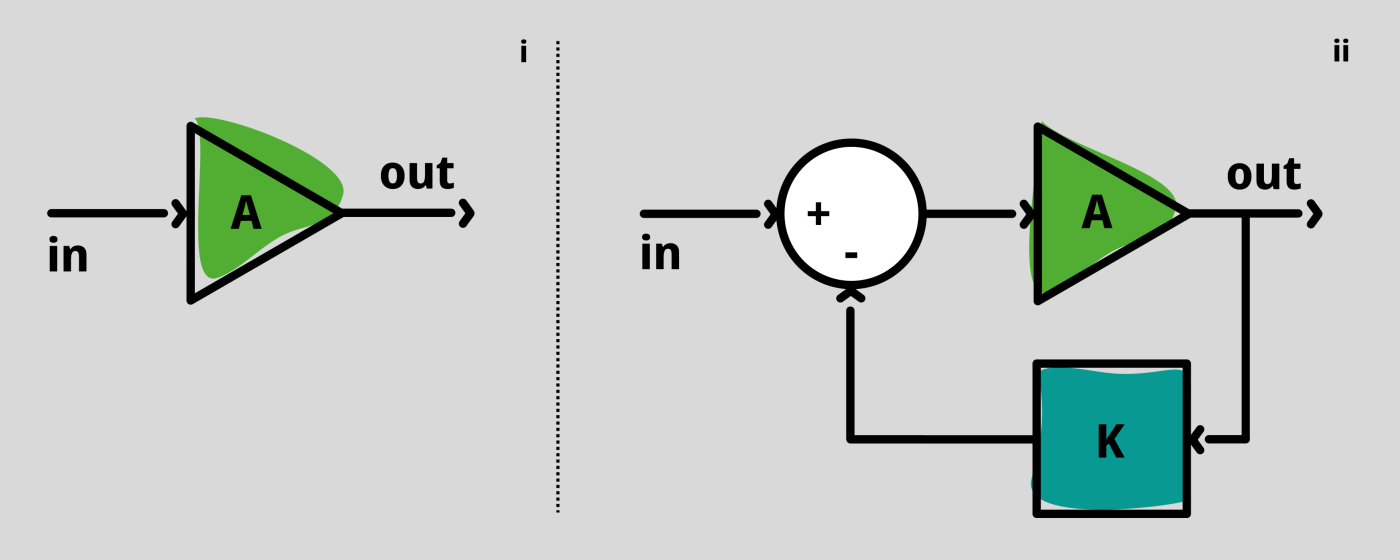
In den frühen 1900er Jahren entstand das Konzept der Rückkopplung in der Telekommunikation. Genauer gesagt wurden Signale über große Entfernungen so schwach, dass Informationen verloren gingen, sodass Ingenieure einen Weg finden mussten, sie zu verstärken. Schematisch und vereinfacht dargestellt würde bei einer Eingabe (in) die Ausgabe (out) wie folgt aussehen: out = A*in, siehe (i). Daher müssen wir sicherstellen, dass die Verstärkung (A) gross genug ist. Die Verstärker waren zu dieser Zeit jedoch nicht sehr zuverlässig, sodass es nicht möglich war, einen festen Wert für A festzulegen. Das ist so, als würde man versuchen, Auto zu fahren, während das Gaspedal nur manchmal funktioniert.

Um dieses Problem zu lösen, entwickelte Harold Black, ein Ingenieur bei Bell Labs, die Rückkopplung. Genauer gesagt, die negative Rückkopplung. Eine schematische Darstellung finden Sie unter (ii). In diesem Fall folgt die Ausgabe der Gleichung out=A/(1+A*K) *in. Wenn A also gross genug ist, unabhängig davon, ob es zuverlässig ist oder nicht, erhalten wir, dass out ungefähr gleich 1/K * in ist.
Beachten Sie, dass Sie in diesem Fall „in“ eher als „Referenzsignal“ betrachten können. Diese Schaltpläne wurden mit analogen Komponenten umgesetzt, und das Schöne daran ist, dass Verstärker zwar aktive Elemente und daher nicht so zuverlässig sind, die Rückkopplungsverstärkung jedoch zuverlässig wäre, da sie mit passiven Komponenten umgesetzt werden kann. Diese Beobachtung erwies sich als revolutionär.
Mehr über diese Entdeckung erfahren Sie in dem grossartigen Buch von Gertner [2]. Bell Labs war seiner Zeit im Allgemeinen weit voraus (ein Bildtelefon?). Es ist auch interessant zu sehen, wie Institutionen wie Bell Labs heutige Forschungseinrichtungen inspiriert haben [Kap. 20, 2]. Für weitere historische und technische Anmerkungen empfehlen wir Ihnen ebenfalls die Folge 38 des inControl-Podcasts anzuhören [3].
Das obige Schema ist wohl die einfachste Darstellung von Rückkopplung. Normalerweise ist das System keine Konstante wie A, sondern ein dynamisches System, in dem sich jeder der Parameter ständig ändert (denken Sie an einen Motor, einen Roboter usw.). Das Beispiel erfasst jedoch den Kern dieses Beitrags: In gewisser Form geben wir einen Fehler an das System zurück, um ein gewünschtes Ergebnis zu erzielen.
Lassen Sie uns das oben Gesagte verallgemeinern und zu einem etwas komplexeren Beispiel übergehen. Typischerweise berücksichtigen wir bei der Entwicklung von Rückkopplungsschemata einen Fehler, den wir möchte 0 sein, sagen wir „err = in - out“, was bedeutet, dass wir keine Fehler in unserem System wollen. Wenn wir dies nach entsprechender Skalierung wieder in das System zurückführen, würden wir dies als „proportionale“ (P) -Regelung bezeichnen. Unser Regelsignal ist proportional zum Fehlersignal. Nehmen wir nun an, dass auch eine konstante, aber unbekannte Störung in das System eintritt. Um sicherzustellen, dass unser Fehler wieder 0 ist, muss unser Regelsignal im Allgemeinen auch einen konstanten Term enthalten, um die Störung auszugleichen. In diesem Fall kann das Steuersignal jedoch nicht nur eine Funktion des Fehlers sein, da der Fehler sonst nie auf 0 gehen würde. Um dies in Einklang zu bringen, wird das Steuersignal so gewählt, dass es proportional zum Integral des Fehlersignals ist. Bei geeigneter Auslegung entspricht das Integral des Fehlers schließlich der Störung, während der Fehler selbst mit zunehmender Zeit verschwindet. Dies ist der Kern des wichtigsten und am weitesten verbreiteten Rückkopplungsschemas namens „PID-Regelung”, das 1922 von Minorsky (1). eingeführt wurde. Technisch versierte Leser können nicht nur den Fehler selbst (P) oder das Integral (I), berücksichtigen, sondern auch dessen Ableitung (D).
Dieser Umweg bringt uns zurück zur Kuhherde. Viele von Ihnen (ich nicht) denken bei Kühen an Milch, und ein Teil der Biologie, die der Milchproduktion zugrunde liegt, hat einen starken Bezug zu den gerade diskutierten Feedback-Konzepten. Insbesondere der Kalziumspiegel in Kühen wird dank Hormonen, die offenbar die biologische Version eines PI-Reglers (4). verwenden, streng reguliert. Um die Geburt herum muss die Mutterkuh für die Milchproduktion Kalzium bereitstellen, wodurch der Kalziumspiegel auf ein gefährlich niedriges Niveau sinkt und einer hormonelle Rückkopplungsmechanismus aktiviert wird.
Wenn Ihnen das bekannt vorkommt, dann deshalb, weil es einem ähnlichen Prozess folgt wie die in Abbildung ii dargestellte Rückkopplung. Diese Beobachtung ist an sich schon sehr interessant und eines von vielen bemerkenswerten Kontrollsystemen, die in der Natur zu finden sind. Darüber hinaus hilft die Identifizierung dieser physiologischen Rückkopplungssysteme dabei, wichtige Faktoren aufzudecken, die Krankheiten verursachen, und eröffnet damit Möglichkeiten für Heilmittel, für prinzipielle Heilmittel.
Mehr über die Entdeckung der negativen Rückkopplung in den Bell Labs können Sie in dem wunderbaren Buch von Gertner (2) lesen.
Weitere historische und technische Anmerkungen zum Thema Rückkopplung finden Sie auch in Folge 38 des in Control-Podcasts (3).
Referenzen:
(1) Hägglund, T., Guzman, J. L. Give us PID controllers and we can control the world. IFACPapersOnLine 58;(2024),n pp. 103-108. DOI: 10.1016/j.ifacol.2024.08.018
(2) Gertner, J. The idea factory Bell Labs and the Great Age of American Innovation. Penguin Books, 2013.
(3) https://www.incontrolpodcast.com/1632769/episodes/18193180-ep38-incontrol-guide-to-feedback
(4) El-Samad, H., Goff, J. P., Khammash, M. Calcium Homeostasis and Parturient Hypocalcemia: An Integral Feedback Perspective. J. Theor. Biol. 214. 2002,pp.17-29.DOI:10.1006/jtbi.2001.2422